Robótica militar en el #CPMX3
Omar Granados (@ogranados1) · 22 de julio de 2011

Sergio Rivera Vega*, un ingeniero en aeronáutica egresado del Instituto Politécnico Nacional (IPN), con maestría en ciencias en sistemas de control de aeronaves por la Universidad Aeroespacial de Jarkov, Ucrania, impartió la conferencia magistral sobre robótica militar, con lo que acercó a los campuseros a una ciencia que aunque para muchos de nosotros parece del futuro, hace años que se aplica en la vida cotidiana, y aún de forma más sorprendente, en el ámbito militar.
La robótica militar ha desarrollado una gran diversidad de funciones, logrando vehículos y dispositivos de todos los tamaños y con desplazamientos aéreo, acuático, submarino, y en todo tipo de terreno.

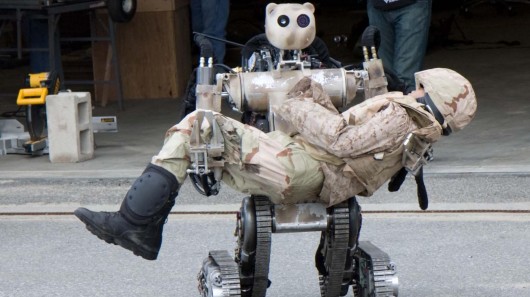
En esta conferencia sobre el resultado de la fusión entre la robótica y la milicia, no sólo se trata de mejorar la forma del ataque, sino también de desarrollar todo tipo de objetivos como salvar vidas.
De acuerdo con Rivera Vega, la robótica militar es una forma específica del desarrollo de la robótica en la que las creaciones deben tener capacidades y movilidad especiales, sensores muy precisos, armas y explosivos, comportamiento muy estricto y específico y una mayor interacción con humanos para obedecer órdenes.

Para diseñar estos robots se necesitan supercomputadoras, modelos matemáticos y muchas horas de cálculo. Sin embargo, los resultados no sólo son impresionantes, sino útiles en el campo de batalla y como siempre en los desarrollos militares, nos hacen vislumbrar el escenario de lo que será la tecnología cotidiana del futuro.
Entre los vehículos que más impresionan están los submarinos teledirigidos, con una increíble visión y que por lo regular son enviados previo a un ataque o en misiones de reconocimiento.
Otro ejemplo del avance actual son los robots que pueden ser armados incluso en el campo de batalla y que sus partes dañadas pueden ser reemplazadas fácilmente para mantener la utilidad y la vida útil, al tiempo que se bajan los costos. El Packbot, de 18 kilogramos, con GPS, que alcanza velocidades de casi 20 Km. por hora y que puede caer de 2 metros de altura, tiene cámara, sensores de audio, está armado y puede detectar explosivos a 20 metros.

Algunos de los vehículos no tripulados más actuales son los robots blindados de combate (ACER), los cuales pueden detectar y desactivar minas, retirar explosivos, rescatar heridos y llevarlos a un lugar seguro. Podrían incluso llegar a los 10 kilómetros por hora y cargan con un tanque de 50 litros de diesel.

Como decíamos hay de todas las características, por ejemplo el Dragon Runner, el cual puede llegar a los 70 kilómetros por hora y es más pequeño y ligero.
Otros más pueden transportar un quirófano y dar atención médica a un militar caído, algunos más con forma de perro, no pierden el equilibrio y pueden caminar a un poco más de 5 kmph.

Muchos de ellos ya existen, otros más con ideas aplicadas al combate se planean para 2025, aunque con mejoras que seguramente cambiarán la forma en la que concebimos la guerra, la cual de por sí, ya no es aquella de inicios del siglo pasado, donde el radar era un mero sonido, sin pantallas o teclados, sino sólo un sonar en clave morse entendido en tonos.
Sin más rollo, puedes observar la conferencia sobre robótica militar aquí:
Un poco más de información e imágenes sobre la robótica militar de avanzada:
Notas relacionadas
La supervivencia del blog en tiempos de Twitter #CPMX3
A la búsqueda de #IdentidadDigital: ¿Soy geek?#CPMX3
La dulce venganza: ¿Medios sociales vs. medios tradicionales? #CPMX3
Un cyborg toma #CPMX3
¿Hacia un Gobierno 2.0 en México? #CPMX3
Las compus se ponen guapas en #CPMX3
Al Gore y los padres del internet defienden la libertad en la red #CPMX3
¿Cuáles son los alcances del activismo digital?